Abstract
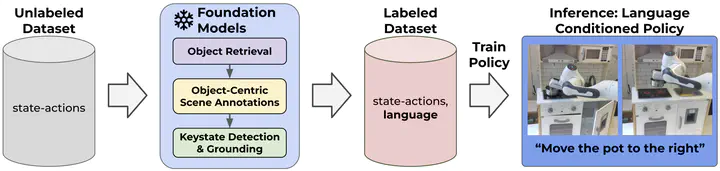
A central challenge towards developing robots that can relate human language to their perception and actions is the scarcity of natural language annotations in diverse robot datasets. Moreover, robot policies that follow natural language instructions are typically trained on either templated language or expensive human-labeled instructions, hindering their scalability. To this end, we introduce NILS Natural language Instruction Labeling for Scalability. NILS automatically labels uncurated, long-horizon robot data at scale in a zero-shot manner without any human intervention. NILS combines pretrained vision-language foundation models in order to detect objects in a scene, detect object-centric changes, segment tasks from large datasets of unlabelled interaction data and ultimately label behavior datasets. Evaluations on BridgeV2, Fractal and a kitchen play dataset show that NILS can autonomously annotate diverse robot demonstrations of unlabeled and unstructured datasets, while alleviating several shortcomings of crowdsourced human annotations, such as low data quality and diversity. We use NILS to label over 115k trajectories obtained from over 430 hours of robot data.