Scaling Cross-Embodied Learning: One Policy for Manipulation, Navigation, Locomotion and Aviation
Abstract
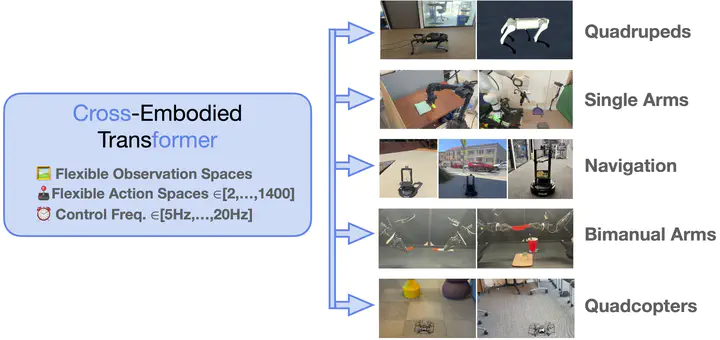
Modern machine learning systems rely on large datasets to attain broad generalization, and this often poses a challenge in robot learning, where each robotic platform and task might have only a small dataset. By training a single policy across many different kinds of robots, a robot learning method can leverage much broader and more diverse datasets, which in turn can lead to better generalization and robustness. However, training a single policy on multi-robot data is challenging because robots can have widely varying sensors, actuators, and control frequencies. We propose CrossFormer, a scalable and flexible transformer-based policy that can consume data from any embodiment. We train CrossFormer on the largest and most diverse dataset to date, 900K trajectories across 20 different robot embodiments. We demonstrate that the same network weights can control vastly different robots, including single and dual arm manipulation systems, wheeled robots, quadcopters, and quadrupeds. Unlike prior work, our model does not require manual alignment of the observation or action spaces. Extensive experiments in the real world show that our method matches the performance of specialist policies tailored for each embodiment, while also significantly outperforming the prior state of the art in cross-embodiment learning.